Перевод статьи: Evaluating Sensor Accuracy: A Comparative Study of LiDAR and CCTV Technologies performance at Signalized Intersections
Автор: Алиреза Ансарияр (Alireza Ansariyar)
Кандидат наук в области дорожного движения и транспортного строительства
Морганский университет
Ссылка на оригинал (англ.) https://www.researchgate.net/publication/374664070_Evaluating_Sensor_Accuracy_A_Comparative_Study_of_LiDAR_and_CCTV_Technologies_performance_at_Signalized_Intersections
Введение
Светофорные перекрестки – важные элементы городских транспортных сетей, отвечающие за управление потоком автомобильного и пешеходного движения для обеспечения безопасности и эффективности. Эти перекрестки полагаются на системы светофоров, которые регулируют движение и предотвращают конфликты между различными участниками дорожного движения.
Однако сбои в работе светофоров, будь то из-за отключений электроэнергии, технических неисправностей или других непредвиденных обстоятельств, могут привести к хаотичным дорожным условиям и представлять серьезные риски для безопасности. В связи с этим становится крайне важным исследовать и внедрять технологии, способные обеспечить точный мониторинг и управление движением во время отказов светофорных систем.
В данном контексте исследование направлено на изучение и сравнение точности датчиков LiDAR и камер видеонаблюдения на светофорных перекрестках в условиях выхода из строя светофорных систем.
Датчики LiDAR, основанные на технологии светорадарного зондирования, привлекают внимание в последние годы благодаря своему потенциалу в управлении дорожным движением. Эти датчики испускают лазерные импульсы и измеряют время, за которое импульсы возвращаются, что позволяет точно вычислять расстояние и скорость объектов.
Преимущества LiDAR включают высокую точность обнаружения объектов, способность создавать детализированные 3D-карты окружающей среды и стабильную работу независимо от условий освещения. Это делает их перспективной технологией для использования в сложных ситуациях, таких как сбои светофорных систем на перекрестках.
Их преимущества заключаются в предоставлении данных в реальном времени о наличии и движении автомобилей, пешеходов и велосипедистов. Датчики LiDAR могут снижать риск аварий, предупреждая водителей и системы управления дорожным движением о потенциальных конфликтах и позволяя эффективно перенаправлять транспортные потоки.
С другой стороны, камеры видеонаблюдения (CCTV) уже давно используются в системах дорожного наблюдения. Они обладают преимуществом захвата визуальной информации на широком угле обзора, что делает их эффективными для мониторинга дорожной обстановки и выявления конфликтов. Камеры CCTV могут быть полезным инструментом для правоохранительных органов и управления дорожным движением.
Однако они имеют определенные ограничения, особенно в условиях плохого освещения или неблагоприятной погоды. Кроме того, камеры CCTV предоставляют двумерные изображения, что может затруднять точную оценку высоты и расстояния объектов. Это ограничение может оказывать влияние на принятие решений при сбоях светофоров, когда важна точная информация о положении и движении транспортных средств.

Методология
Исследование следует структурированному подходу для изучения и сравнения точности датчиков LiDAR и камер видеонаблюдения на светофорных перекрестках при отказе светофорных систем. Основной целью является оценка производительности этих технологий в условиях выхода из строя светофоров, с акцентом на их преимущества и недостатки.
На перекрестке E Cold Spring Ln и Hillen Rd был установлен датчик LiDAR в апреле 2022 года для сбора данных о дорожном движении в режиме реального времени с высокой точностью. Были использованы алгоритмы машинного обучения для очистки и предварительной обработки данных LiDAR, что включало удаление шума и выбросов, а также синхронизацию данных с временными метками отказов светофоров.
Датчик LiDAR и две камеры CCTV были стратегически размещены на перекрестке E Cold Spring Ln и Hillen Rd в городе Балтимор для мониторинга и записи движения транспорта во время отказов светофорных систем. Датчик LiDAR был откалиброван для сбора данных о движении транспортных средств и пешеходов, включая скорость, положение и траекторию. Кроме того, LiDAR был настроен для создания 3D-карт перекрестка.
Настройки углов и положения двух камер видеонаблюдения были оптимизированы для лучшего охвата перекрестка, с акцентом на фиксирование движений автомобилей и пешеходов при различных условиях освещения.
Для оценки производительности датчиков LiDAR и камер CCTV в условиях отказа светофоров системы управления светофорами на выбранных перекрестках временно отключались из-за отключения электроэнергии 13 сентября с 05:30 до 10:23 утра. Исследование сосредоточилось на анализе данных в течение одного часа – с 09:23 до 10:23, так как в это время наблюдался значительный поток автомобилей и пешеходов, а также наибольшая вероятность возникновения конфликтов между транспортными средствами (V2V), и между транспортными средствами и пешеходами (V2P).
Собранные данные с датчика LiDAR и камер CCTV были всесторонне проанализированы, с фокусом на такие параметры, как «точность и скорость обнаружения объектов», «анализ отслеживания и движения объектов» и «качество собранных данных».
Затем были оценены преимущества и недостатки датчика LiDAR и камер CCTV на основе выявленных параметров производительности. В итоге был проведен сравнительный анализ их эффективности в мониторинге дорожного движения, обнаружении объектов и адаптируемости к различным условиям окружающей среды, а также их потенциала для интеграции в городские системы управления транспортом.
Данное исследование сосредоточено на перекрестке E Cold Spring Ln и Hillen Rd в городе Балтимор, штат Мэриленд. Данные с датчика LiDAR за 13 сентября 2023 года были проанализированы. Местоположение перекрестка показано на рисунке 1. Черный круг указывает на расположение датчика LiDAR, а черный прямоугольник — на расположение двух камер CCTV.
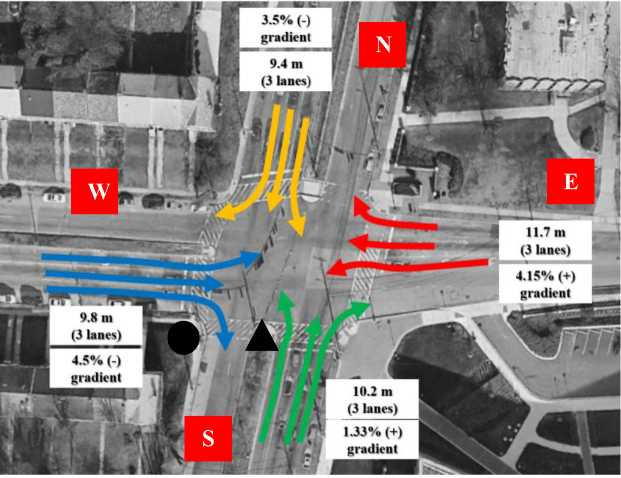
Рисунок 1. Перекресток E Cold Spring Ln — Hillen Rd
Результаты анализа данных – LiDAR и камеры CCTV
Анализ данных LiDAR
Исследование проанализировало данные о движении с 09:23 до 10:23 утра 13 сентября. В период с 05:30 до 10:23 утра 13 сентября контроллер светофора перестал функционировать [1]. В течение последнего часа хаотичных условий (отказ светофорной системы) исследование изучило дорожную обстановку на перекрестке.
Таблица 1 показывает количество транспортных средств до и во время хаотичных условий.
| Date | Hour | NE | NS | NW | ES | EW | EN | SW | SN | SE | WN | WE | WS | SUM |
| 08:00 — 09:00 AM | 114 | 991 | 213 | 109 | 309 | 165 | 30 | 516 | 83 | 147 | 286 | 8 | 2971 | |
| 09:00 — 09:23 AM | 43 | 251 | 65 | 26 | 80 | 44 | 11 | 181 | 18 | 64 | 85 | 0 | 868 | |
| September 13th | 09:23 — 09:38 AM | 28 | 164 | 43 | 17 | 52 | 29 | 7 | 118 | 12 | 42 | 56 | 0 | 566 |
| 09:38 — 09:53 AM | 26 | 153 | 40 | 16 | 49 | 27 | 7 | 110 | 11 | 39 | 52 | 0 | 528 | |
| 09:53 — 10:08 AM | 26 | 122 | 29 | 16 | 40 | 23 | 6 | 95 | 12 | 32 | 38 | 1 | 440 | |
| 10:08 — 10:23 AM | 20 | 65 | 12 | 13 | 23 | 14 | 4 | 60 | 11 | 19 | 15 | 1 | 258 |
Рисунок 2 иллюстрирует общее количество транспортных средств (автомобилей, автобусов, грузовиков и прицепов), проезжающих через перекресток в разные временные интервалы, как это представлено в Таблице 1.
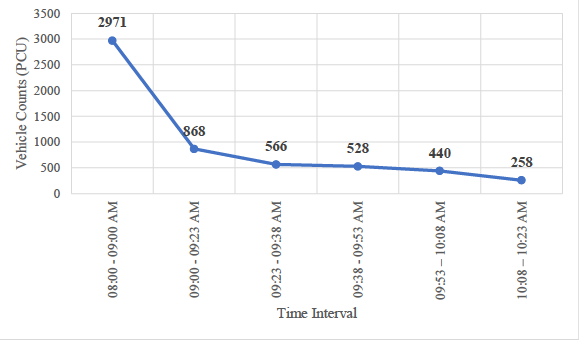
Рисунок 2. Объемы транспортных средств (количество), зафиксированные датчиком LiDAR
Таблица 2 показывает количество пешеходов до и во время хаотичных условий. В соответствии с Рисунком 3, в различных временных интервалах представлено общее количество пешеходов, пересекающих перекресток.
| Date | Hour | N | E | S | W | SUM |
| 08:00 — 09:00 AM | 40 | 16 | 32 | 6 | 94 | |
| 09:00 — 09:23 AM | 21 | 8 | 14 | 4 | 48 | |
| September 13th | 09:23 — 09:38 AM | 14 | 6 | 9 | 3 | 31 |
| 09:38 — 09:53 AM | 13 | 5 | 8 | 3 | 29 | |
| 09:53 — 10:08 AM | 11 | 5 | 7 | 5 | 28 | |
| 10:08 — 10:23 AM | 0 | 2 | 1 | 7 | 10 |
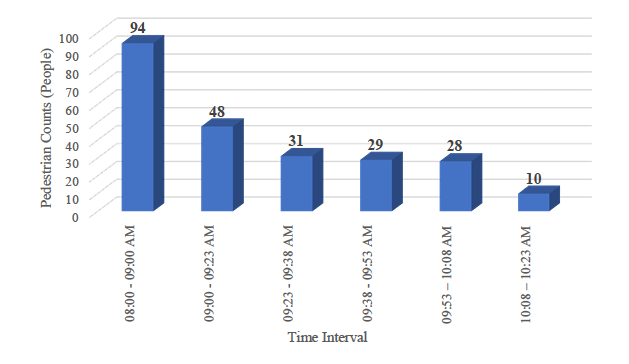
Рисунок 3. Количество пешеходов, зафиксированных датчиком LiDAR.
Анализ данных CCTV
Система CCTV предлагает несколько преимуществ для сбора данных о движении в реальном времени во время отказов светофоров. Прежде всего, они обеспечивают непрерывный мониторинг перекрестка в режиме реального времени. Эта постоянная слежка позволяет органам управления движением быть в курсе дорожной обстановки и инцидентов, что позволяет быстро реагировать даже в случае неработоспособности светофоров.
Кроме того, камеры CCTV имеют широкий угол обзора, что позволяет захватывать обширные визуальные данные всего перекрестка. Этот широкий взгляд имеет неоценимое значение для оценки дорожных перемещений, подсчета транспортных средств и выявления паттернов заторов. Более того, внедрение систем CCTV обычно оказывает меньшее влияние на существующую инфраструктуру по сравнению с другими решениями на основе датчиков.
Это сниженное требование к дорожным работам и установке минимизирует нарушения и может привести к экономически эффективному развертыванию. Кроме того, технологии CCTV универсальны и могут быть бесшовно интегрированы в существующие системы управления движением, выполняя несколько функций, включая наблюдение для правоохранительных органов и управление инцидентами. Наконец, визуальные данные, полученные от CCTV, могут быть использованы для перекрестной проверки и верификации других источников данных на основе датчиков, что повышает точность и надежность данных.
Несмотря на свои преимущества, системы CCTV имеют заметные недостатки при использовании для сбора данных о движении в реальном времени во время отказов светофоров. Одним из самых значительных ограничений являются условия освещения. Ночные или неблагоприятные погодные условия делают камеры CCTV менее эффективными, что приводит к неполному или неточному сбору данных.
Кроме того, вопросы конфиденциальности также важны при использовании CCTV для непрерывного мониторинга общественных пространств. Этические и правовые рамки для сбора и хранения данных крайне важны для решения этих вопросов. Более того, хотя камеры CCTV эффективны для общего наблюдения, они могут иметь ограниченные возможности обнаружения по сравнению со специализированными системами.
Для проверки точности камер CCTV было записано несколько видео с помощью двух установленных камер с 09:23 до 10:23 утра 13 сентября (в солнечную погоду), чтобы вручную подсчитать данные и проанализировать видео с помощью нового алгоритма обработки изображений.
Ниже приведены результаты подсчета, выполненные с помощью камер CCTV. Количество транспортных средств представлено в Таблице 3 после анализа с использованием алгоритма обработки изображений, реализованного в программном обеспечении MATLAB, и ручного подсчета записанных видео CCTV.
Таблица 3. Количество транспортных средств, зафиксированных двумя камерами CCTV
| Date | Hour | NE | NS | NW | ES | EW | EN | SW | SN | SE | WN | WE | WS | sum |
| 09:23 — 09:38 AM | 28 | 161 | 42 | 17 | 51 | 28 | 7 | 116 | 11 | 41 | 55 | 0 | 558 | |
| September 13th | 09:38 — 09:53 AM | 25 | 150 | 38 | 16 | 48 | 27 | 7 | 108 | 10 | 38 | 52 | 0 | 519 |
| (during signal failure) | 09:53 — 10:08 AM | 18 | 120 | 27 | 15 | 40 | 23 | 6 | 93 | 12 | 31 | 34 | 30 | 449 |
| 10:08 — 10:23 AM | 19 | 68 | 12 | 13 | 22 | 13 | 4 | 64 | 11 | 18 | 15 | 1 | 260 |
На основе видео с камер CCTV, проанализированных в период хаоса, Рисунок 4 показывает общее количество транспортных средств в различных временных интервалах.
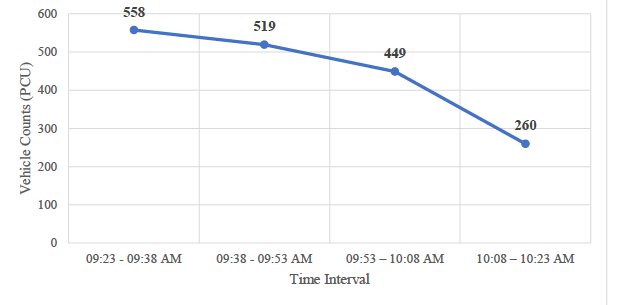
Рисунок 4. Количество транспортных средств, зафиксированных двумя камерами CCTV.
Количество пешеходов, проанализированных по видео с камер CCTV в период пика, представлено в Таблице 4. В соответствии с Рисунком 5, в различных временных интервалах показано общее количество пешеходов, пересекающих перекресток.
Таблица 4. Количество пешеходов, проанализированных двумя камерами CCTV.
| Date | Hour | N | E | S | W | SUM |
| 09:23 — 09:38 AM | 14 | 5 | 10 | 3 | 32 | |
| September 13th | 09:38 — 09:53 AM | 13 | 5 | 8 | 3 | 29 |
| (during signal failure) | 09:53 — 10:08 AM | 11 | 4 | 7 | 6 | 28 |
| 10:08 — 10:23 AM | 0 | 2 | 1 | 8 | 11 |
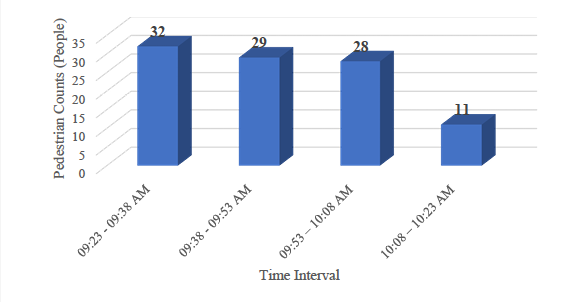
Рисунок 5. Количество пешеходов, зафиксированные двумя камерами CCTV.
Сравнение результатов LiDAR и CCTV
В стремлении понять преимущества обеих технологий, технология LiDAR использовалась для сбора высокоточных 3D данных о движениях транспортных средств, в то время как камеры CCTV фиксировали традиционные 2D видеозаписи. Преимущества технологии LiDAR стали очевидны в ходе нашего анализа. LiDAR обеспечивает неинвазивный и бесконтактный подход к сбору данных, что снижает риск вмешательства наблюдателя.
Кроме того, LiDAR превосходно работает в неблагоприятных погодных условиях и условиях низкой освещенности, обеспечивая надежность сбора данных. Более того, его способность обнаруживать и различать несколько транспортных средств вблизи оказывается полезной в сценариях с интенсивным движением. В то же время, камеры CCTV сталкиваются с ограничениями в отношении точности данных и вопросов конфиденциальности, а также необходимостью ручной аннотации для точного подсчета и классификации транспортных средств.
Этот раздел стремится предоставить ценную информацию о применении технологий LiDAR и CCTV в мониторинге дорожного движения и анализе сигнализированных перекрестков. Это сравнительное исследование поддерживает мнение о том, что LiDAR предлагает значительные преимущества в плане точности данных, последовательности и легкости развертывания.
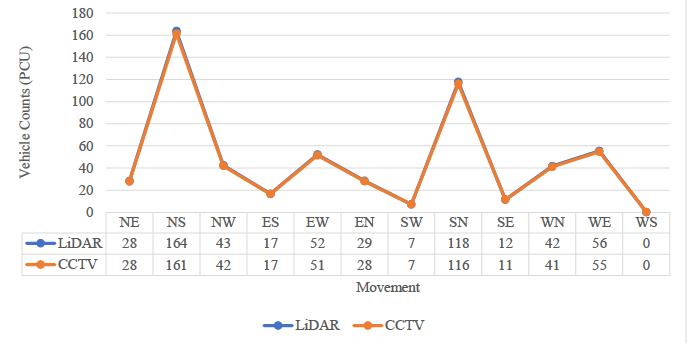
Рисунок 6. Сравнение данных о количестве транспортных средств, собранные с помощью LiDAR и CCTV с 09:23 до 09:38
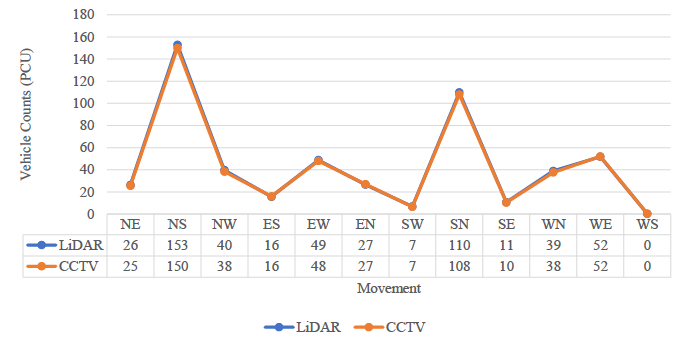
Рисунок 7. Данные о количестве транспортных средств, собранные с помощью LiDAR и CCTV с 09:38 до 09:53.
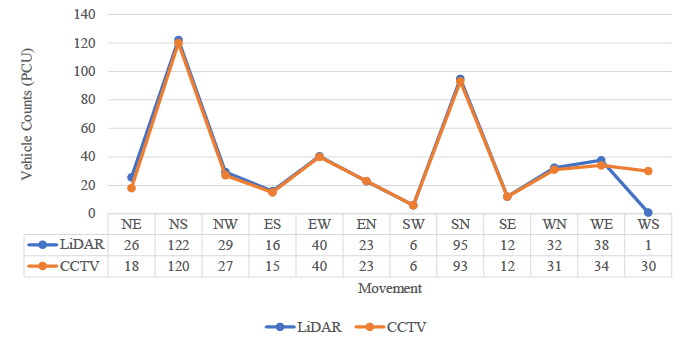
Рисунок 8 показывает сравнение результатов LiDAR и CCTV с 09:53 до 10:08.
Как видно на Рисунке 8, существует значительная разница в показателях для направления WS (восточный поворот вправо) на перекрестке E Cold Spring Ln — Hillen Rd. Хотя датчики LiDAR продемонстрировали выдающиеся возможности в области сбора данных о дорожном движении, у них есть и ограничения.
Одной из наиболее актуальных проблем является их неспособность точно фиксировать движения транспортных средств вблизи места установки датчика (как показано на Рисунке 1 – черный круг), что приводит к возникновению явления, известного как «слепые зоны установки». Понимание ограничений датчиков LiDAR, особенно в тех случаях, когда точность имеет решающее значение, может иметь далеко идущие последствия для повышения безопасности дорожного движения и его эффективности.
Датчики LiDAR славятся своей высокой точностью и аккуратностью в захвате трехмерных данных. Термин «слепые зоны установки» был введен для описания тех зон, где датчики LiDAR испытывают трудности с обнаружением и точным подсчетом транспортных средств.
Эти ограничения могут быть обусловлены несколькими факторами, включая высоту и угол установки датчика, затенение, вызванное ближайшими зданиями или транспортными средствами, и линию видимости датчика. На практике эти ограничения приводят к недоучету или пропуску определенных транспортных средств, что создает значительные проблемы для дорожных инженеров и градостроителей, которые полагаются на точные данные для принятия решений.
В период с 09:23 до 09:53 не было автомобилей, поворачивающих вправо с Cold Spring Ln на Hillen Rd. Следовательно, не было значительных различий между результатами LiDAR и CCTV. Из-за проезда тридцати транспортных средств в этом направлении (WS) и эффекта слепой зоны датчика LiDAR не смог точно зафиксировать проезжающие автомобили между 09:53 и 10:08.
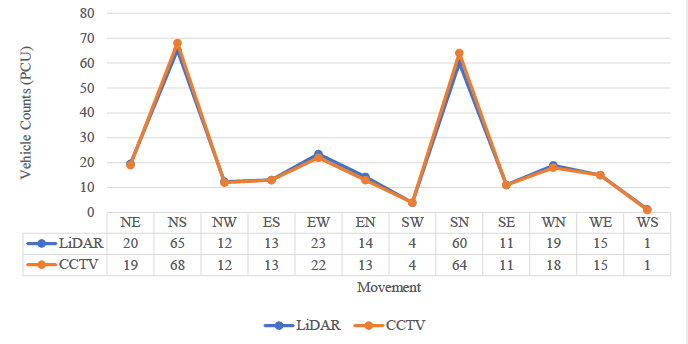
Рисунок 9. Данные о количестве транспортных средств, собранные с помощью LiDAR и CCTV с 10:08 до 10:23.
Как видно на Рисунке 9, в условиях низкой загрузки (только один автомобиль проехал по направлению WS) эта адаптивность особенно ценна. Более того, технология LiDAR позволяет проводить анализ после события, что полезно для оценки воздействия мер управления движением.
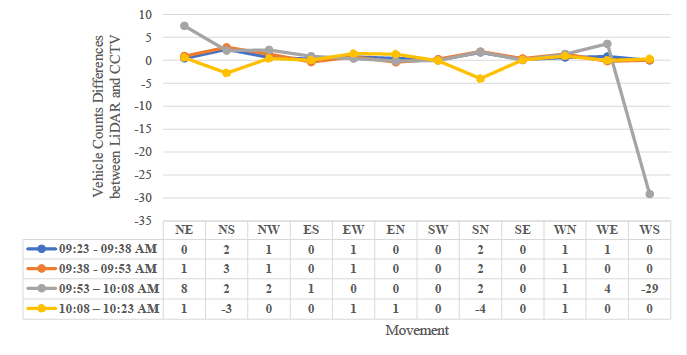
Рисунок 10. Результаты подсчета транспортных средств с использованием LiDAR и CCTV.
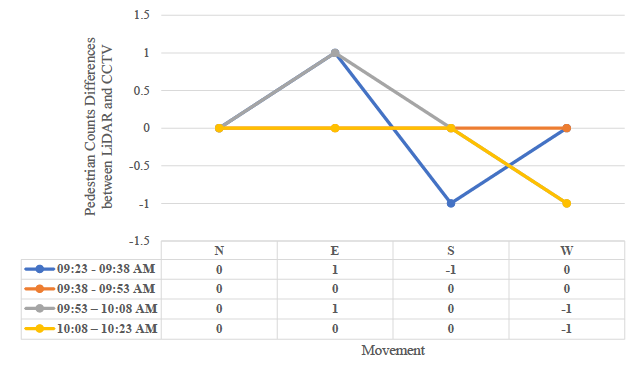
Рисунок 11. Результаты подсчета пешеходов с использованием технологий LiDAR и CCTV.
Выводы исследования
В последние годы использование современных технологий для мониторинга дорожного движения привело к появлению новых методик, в числе которых лидарные (LiDAR) датчики и камеры видеонаблюдения (CCTV) находятся на переднем плане. Данное исследование направлено на изучение точности и преимуществ использования LiDAR-сенсоров по сравнению с традиционными CCTV-камерами для подсчета транспортных средств и пешеходов на светофорных перекрестках с высокой частотой аварий в Балтиморе. Понимание преимуществ технологии LiDAR может сыграть ключевую роль в модернизации процессов сбора данных о дорожном движении и принятии обоснованных решений в градостроительном планировании и управлении движением.
LiDAR-сенсоры, известные своей способностью точно захватывать трехмерные данные, зарекомендовали себя как весьма полезные для подсчета транспортных средств и пешеходов на светофорных перекрестках. Преимущества технологии LiDAR включают ее ненавязчивость и бесконтактный характер. Эти характеристики снижают риск вмешательства в дорожное движение и обеспечивают безопасность пешеходов и водителей.

Кроме того, технология LiDAR надежно работает в различных погодных условиях, включая условия низкой видимости и неблагоприятную погоду. В отличие от традиционных методов, когда видимость может быть нарушена из-за тумана, дождя или темноты, LiDAR-сенсоры последовательно поддерживают точность данных. Более того, способность LiDAR различать несколько объектов вблизи друг от друга способствует его точности, что особенно важно на светофорных перекрестках с сложными транспортными потоками.
Хотя CCTV-камеры широко используют для мониторинга дорожного движения, они имеют свои ограничения по сравнению с LiDAR-сенсорами. Традиционные 2D-видеозаписи с камер CCTV требуют человеческого вмешательства для точного подсчета транспортных средств и пешеходов.
Этот процесс требует значительных затрат труда и подвержен ошибкам, что делает данные менее надежными. Более того, CCTV-камеры могут сталкиваться с проблемами конфиденциальности из-за возможности захвата изображений и видеозаписей пешеходов и транспортных средств, что может создавать этические проблемы и требовать соблюдения норм по защите данных.
Их производительность также может снижаться из-за таких факторов окружающей среды, как блики или отражения на линзе камеры. Таким образом, в сравнении с LiDAR-сенсорами, CCTV-камеры уступают по точности, надежности и легкости сбора данных.
Результаты данного исследования подчеркивают преимущества использования LiDAR-сенсоров по сравнению с CCTV-камерами для подсчета транспортных средств и пешеходов на светофорных перекрестках. Технология LiDAR предлагает высокую точность, ненавязчивую работу и надежность в сложных условиях окружающей среды, что делает ее более предпочтительной для анализа в реальном времени и постфактум. Современные городские условия требуют эффективных и надежных данных о дорожном движении, и LiDAR-сенсоры предоставляют решение, соответствующее требованиям точности данных и вопросам конфиденциальности.
Применение технологии LiDAR обещает революционизировать сбор данных о дорожном движении на светофорных перекрестках, что, в конечном счете, приведет к улучшению управления дорожным движением, повышению безопасности и обоснованным решениям в градостроительном планировании и развитии.
Точность обнаружения объектов и скорость сбора данных LiDAR
Высокая скорость получения данных LiDAR, достигающая сотен тысяч точек в секунду, позволяет осуществлять сбор данных в реальном времени, что является критически важным для динамичных дорожных сценариев. Это сочетание точности и скорости улучшило сбор данных о дорожном движении на светофорных перекрестках, предоставляя ценные сведения для управления движением, анализа безопасности и градостроительного планирования.
Возможности отслеживания и анализа движения
Постоянно сканируя окружающую среду и фиксируя движения объектов в реальном времени, LiDAR-сенсоры обеспечивают не только точные подсчеты, но и обширные данные для комплексного анализа движения. Этот уровень детализации позволяет дорожным инженерам и градостроителям изучать сложные паттерны, включая траектории движения транспортных средств, поведение пешеходов и даже взаимодействие между различными видами транспорта.
Кроме того, высокая частота обновления данных LiDAR-сенсоров позволяет почти мгновенно отслеживать объекты, что является неоценимым для мониторинга и понимания динамичных дорожных сценариев. Эта усовершенствованная способность отслеживания и анализа движения является основной для повышения эффективности управления дорожным движением, оптимизации временных графиков светофоров, улучшения мер безопасности и обеспечения эффективного градостроительного планирования. В конечном итоге, это способствует более обоснованным решениям в области транспорта и дорожной инженерии.
Ограничения LiDAR: слепые зоны
Как показано на рисунках 10 и 11, LiDAR-сенсор способен точно собирать данные о количестве транспортных средств и пешеходов. Однако в направлении восточного поворота (WS) наблюдается значительная разница, которая часто связывается с наличием «слепых зон» – участков, где LiDAR-сенсоры испытывают трудности в точном обнаружении и подсчете транспортных средств. Основная проблема связана с углом обзора сенсора и возможными препятствиями в линии видимости.
Когда LiDAR-сенсор размещен близко к интересующей зоне, например, рядом с линией установки светофора, его линия видимости может быть заблокирована крупными транспортными средствами, дорожной инфраструктурой или даже самим светофором. В результате такая блокировка может привести к недоучету или выпадению некоторых транспортных средств из обзора, что является особенно проблематичным в областях, где требуется высокая точность, например, на светофорных перекрестках, где безопасность пешеходов и автомобилей имеет первостепенное значение.
Понимание «слепых зон»
Решения для преодоления слепых зон заключаются в стратегическом размещении сенсоров и оптимизированных конфигурациях установки. Увеличение высоты установки сенсора может обеспечить более широкий обзор, тем самым уменьшая количество слепых зон. Корректировка угла и ориентации сенсора также может улучшить видимость в критических областях, особенно вблизи линий установки.
Кроме того, технологии LiDAR продолжают развиваться, и на рынке появляются сенсоры с более широким углом обзора и улучшенными возможностями обнаружения. Разработка интеллектуальных алгоритмов, компенсирующих слепые зоны и неточности, вызванные блокировками, является еще одним направлением прогресса. Интегрируя эти стратегии и инновации, дорожные инженеры и планировщики могут использовать преимущества технологии LiDAR, минимизируя влияние слепых зон и обеспечивая точность и надежность сбора данных даже в областях, близких к месту установки сенсора.
Экономическая эффективность технологий
После установки LiDAR-сенсоры требуют минимального обслуживания и имеют значительно больший срок службы по сравнению с традиционными CCTV-камерами. Снижение затрат на обслуживание и замену делает LiDAR экономически целесообразным выбором на протяжении всего жизненного цикла системы. Кроме того, высокая точность и качество данных, которые предоставляет LiDAR, могут способствовать принятию более обоснованных решений, снижая потенциальные затраты, связанные с ошибочными мерами управления движением.
С другой стороны, CCTV-камеры могут показаться экономически эффективными на начальном этапе из-за их более низких первоначальных затрат на покупку и установку. Однако со временем затраты на обслуживание и необходимость человеческого вмешательства для точного подсчета транспортных средств и пешеходов могут привести к увеличению операционных расходов.
Более того, проблемы конфиденциальности и возможные требования по защите данных могут потребовать дополнительных инвестиций в технологии и меры по соблюдению нормативных требований. Это представляет собой сложное экономическое уравнение для городских планировщиков и дорожных инженеров.
Важно взвесить непосредственные затраты на установку относительно долгосрочной экономии, улучшения качества данных и потенциала для продвинутого анализа данных, которые предлагает технология LiDAR, обеспечивая полное понимание экономических последствий выбора между LiDAR-сенсорами и CCTV-камерами для сбора данных о движении в реальном времени на светофорных перекрестках.